图源:https://www.pixiv.net/artworks/85217491
根据上面的学习,能够大致了解一个NavMesh2D的制作流程了,所以接下来就是上手实践。Unity3D架构设计NavMesh寻路 的设计。
根据顶点生成多边形 由于所制作的为纯2D,是可以由sprite的顶点信息获取边缘信息的,所以在此我想先跳过光栅化的阶段,先行从多边形生成开始。
在此需要制定多边形类的信息,在此设定的多边形类的参数为List<Vector>类型的顶点列表。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 public class Polygon { public List<Vector2> points; public Polygon ( points = new List<Vector2>(); } public Polygon (List<Vector2> vertices ) points = new List<Vector2>(); foreach (var vertex in vertices) { points.Add(vertex); } } public Polygon (Vector2[] vertices ) points = new List<Vector2>(); foreach (var vertex in vertices) { points.Add(vertex); } } }
有了点就该有线了,那么线应该就是由一个起点 与一个终点 所组成。
1 2 3 4 5 6 7 8 9 10 11 public class Line { public Vector2 start; public Vector2 end; public Line (Vector2 start, Vector2 end ) this .start = start; this .end = end; } }
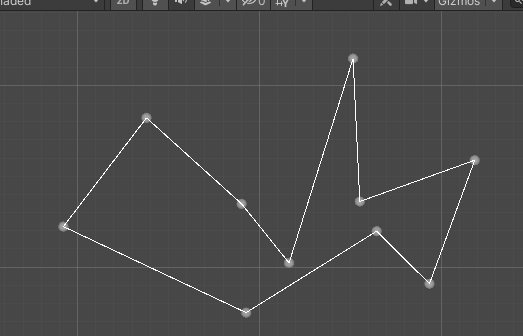
然后只要规定一个连线顺序(在这我规定的是外多边形为顺时针,内多边形为逆时针),就可以描述一个多边形了。
用Gizmo来绘制测试一下
对单个多边形进行三角形剖分 多边形有了后,就该着手进行剖分了,先不考虑存在空洞、相交的情况。
为了进行剖分,首先需要构建三角形类,三角形的组成和多边形类似,但为了进行一些操作所以需要更多的参数。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 public class Triangle { public Vector2[] points; public int ID; public int [] neighborID; public Vector2 center; public Triangle ( points = new Vector2[3 ]; neighborID = new int [] { -1 , -1 , -1 }; center = Vector2.zero; } public Triangle (Vector2 pos1,Vector2 pos2,Vector2 pos3,int id ) points = new [] {pos1, pos2, pos3}; ID = id; neighborID = new [] {-1 , -1 , -1 }; center.x = (points[0 ].x + points[1 ].x + points[2 ].x) / 3 ; center.y = (points[0 ].y + points[1 ].y + points[2 ].y) / 3 ; } }
在剖分前,还需要几个工具类进行辅助操作。
在工具类Util中,添加以下方法:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 public static bool TryGetInnerPoints (Triangle triangle,Polygon polygon,out List<int > res ) res = new List<int >(); List<Vector2> points = polygon.points; HashSet<Vector2> trianglePoints = new HashSet<Vector2>(triangle.points); for (int i = 0 ; i < points.Count; i++) { if (!trianglePoints.Contains(points[i])) { if (MUtil.IsPointIn(points[i], triangle)) { res.Add(i); } } } if (res.Count > 0 ) return true ; return false ; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 public static bool IsPointIn (Vector2 point,Triangle triangle ) Vector3 AB = triangle.points[1 ] - triangle.points[0 ]; Vector3 AC = triangle.points[2 ] - triangle.points[0 ]; Vector3 AP = point - triangle.points[0 ]; float ABAB = Vector3.Dot(AB, AB); float ABAC = Vector3.Dot(AB, AC); float ABAP = Vector3.Dot(AB, AP); float ACAC = Vector3.Dot(AC, AC); float ACAP = Vector3.Dot(AC, AP); float inverDeno = 1 / (ABAB * ACAC - ABAC * ABAC); float u = (ACAC * ABAP - ABAC * ACAP) * inverDeno; if (u < 0 || u > 1 ) { return false ; } float v = (ABAB * ACAP - ABAC * ABAP) * inverDeno; if (v < 0 || v > 1 ) { return false ; } return u + v <= 1 ; }
在三角形类中,添加方法:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 public Line GetLineByIndex (int index Line line; switch (index) { case 0 : line = new Line(this .points[0 ], this .points[1 ]); break ; case 1 : line = new Line(this .points[1 ], this .points[2 ]); break ; case 2 : line = new Line(this .points[2 ], this .points[0 ]); break ; default : line = new Line(this .points[0 ], this .points[1 ]); break ; } return line; }
为了获取三角形之间的关系,所以需要有
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 public bool TryGetNeighbor (Triangle triangle,out int res ) for (int i = 0 ; i < 3 ; i++) { for (int j = 0 ; j < 3 ; j++) { if (GetLineByIndex(i).Equals(triangle.GetLineByIndex(j))) { res = i; return true ; } } } res = -1 ; return false ; }
由此就可以进行接下来的剖分操作了。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 public List<Triangle> EarCliping ( Clockwise(); List<Triangle> res = new List<Triangle>(); List<Vector2> pointsTmp = new List<Vector2>(points); int tmp = 10000 ; int id = 0 ; while (pointsTmp.Count > 3 && tmp > 0 ) { tmp--; for (int i = 0 ; i < pointsTmp.Count; ++i) { Triangle triangle = new Triangle(pointsTmp[i - 1 < 0 ? pointsTmp.Count - 1 :i-1 ], pointsTmp[i],pointsTmp[i + 1 >= pointsTmp.Count ? 0 : i + 1 ],0 ); if (triangle.GetLineByIndex(0 ).ClassifyPoint(triangle.center) != PointSide.LEFT_SIDE) continue ; if (!MUtil.TryGetInnerPoints(triangle,this , out List<int > inners)) { triangle.ID = id; ++id; res.Add(triangle); pointsTmp.RemoveAt(i); break ; } } } Triangle last = new Triangle(pointsTmp[0 ],pointsTmp[1 ],pointsTmp[2 ],id); res.Add(last); MUtil.FindNeiborgh(res); return res; }
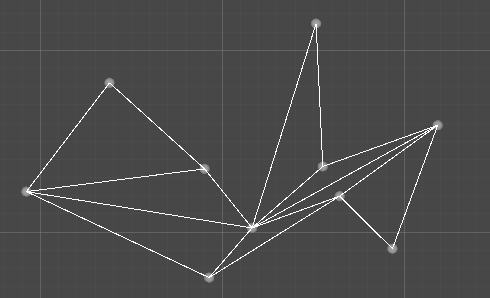
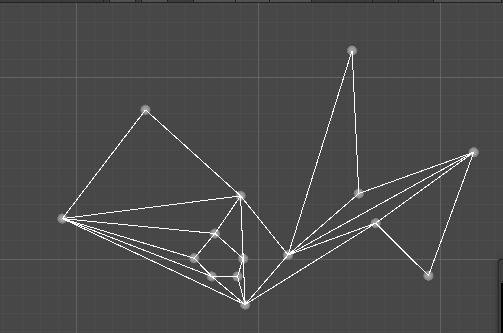
进行测试,现在已经可以获得剖分后的三角形了
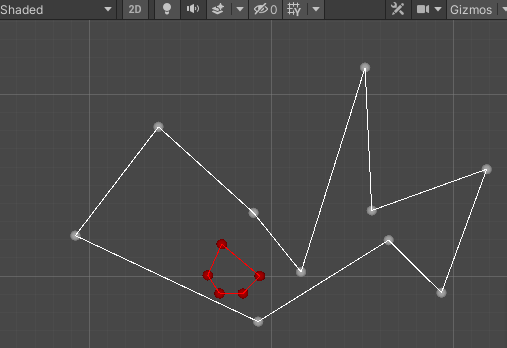
对内部有空洞的多边形进行剖分 下一步就是如果内部存在空洞的情况了,在这先只考虑简单情况,即不出现套娃型空洞。
那么需要做的就是先将内部空洞多边形与外部合并成简单多边形,此处则需要寻找到互相可见点 。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 public static int [] FindVisiblePoint (Polygon outer, Polygon inner ) int [] ans = new int [2 ]; var xMaxPoint = inner.GetXMaxPointIndex(); ans[0 ] = xMaxPoint; outer.Clockwise(); inner.Counterclockwise(); Vector2 targetPoint = inner.points[xMaxPoint] + Vector2.right * 100000 ; Vector2 crossPoint = Vector2.zero; int targetPointIndex = 0 ; for (int i = 0 ; i < outer.points.Count; ++i) { Vector2 point1 = outer.points[i]; Vector2 point2 = outer.points[i + 1 >= outer.points.Count ? 0 : i + 1 ]; if (MMath.TryGetCrossWithXRay(inner.points[xMaxPoint], point1,point2, out Vector2 res)) { Vector2 target = Vector2.Distance(point1, inner.points[xMaxPoint]) <= Vector2.Distance(point2, inner.points[xMaxPoint]) ? point1 : point2; int index = target.Equals(point1) ? i : (i + 1 >= outer.points.Count ? 0 : i + 1 ); if (Vector2.Distance(target, inner.points[xMaxPoint]) < Vector2.Distance(targetPoint, inner.points[xMaxPoint])) { targetPoint = target; crossPoint = res; targetPointIndex = index; } } } if (TryGetInnerPoints(new Triangle(inner.points[xMaxPoint], crossPoint, targetPoint, 0 , 0 ), outer, out List<int > points) ) { int index = 0 ; Vector2 v1 = (crossPoint - inner.points[xMaxPoint]).normalized; float minCos = Vector2.Dot(v1, (outer.points[points[0 ]] - inner.points[xMaxPoint]).normalized); for (int j = 0 ; j < points.Count; ++j) { Vector2 v2 = outer.points[points[j]] - inner.points[xMaxPoint]; float cos = Vector2.Dot(v1, v2.normalized); if (minCos > cos) { minCos = cos; ans[1 ] = points[j]; } } return ans; } ans[1 ] = targetPointIndex; return ans; }
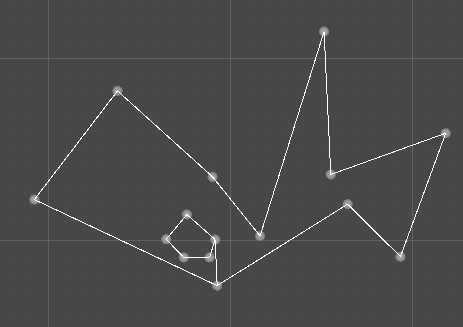
至此,就能够将内多边形与外多边形合并成简单多边形了
然后再对这个简单多边形进行剖分
就可以得到剖分后的三角形们了。
使三角形支持A*寻路 当然,目前的三角形还是不够完成寻路操作的。对于三角形的寻路一般使用的是A*算法,所以有几个关键参数需要补充到三角形上,那就是G 和H ,其中H这里设置为到目标的直线距离 ,由于此时的网格不是二维数组网格那样的规整网格,所以G的计算需要重新想方法,在这里则设置为三角形的从进入到出去所要移动的距离(进入边到离开边的中点之间的距离) 。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 public class NavTriangle : Triangle { public int traversalTimes; public int parentID; public bool isOpen; public double H; public double G; public int inWallIndex; public int outWallIndex; public NavTriangle (base ( Reset(); } public void Reset ( this .traversalTimes = -1 ; this .parentID = -1 ; this .isOpen = false ; this .outWallIndex = -1 ; this .H = 0 ; this .G = 0 ; this .inWallIndex = -1 ; } }
然后在Triangle中添加public double[] neighborWallDistance;保存相邻两边的中点距离(0-1,1-2,2-0三边),在构造函数中进行计算。
到这,除了一些辅助性方法外,已经做好了A*的准备工作。